Robot sẽ tự động di chuyển và nhận diện cây cao su, sau đó dùng cánh tay có gắn ống nhựa di chuyển đến chén đựng mủ và tiến hành hút mủ đưa vào bình chứa.
Đó là cơ chế hoạt động của robot tự động thu nhập mủ cao su tự động do một nhóm học sinh yêu thích nghiên cứu khoa học trường THPT Gia Định (Q. Bình Thạnh, TP.HCM) dày công thiết kế.
Thấy được sự vất vả của những người công nhân cặm cụi cạo, thu hoạch mủ qua những lần đi chơi với bạn bè qua rừng cao su bạt ngàn, nhóm đã nảy ra ý tưởng tạo nên sản phẩm robot hỗ trợ, giúp công nhân có thể tiết kiệm được thời gian và công sức.
Với những kiến thức vật lý có được cùng việc tìm hiểu các bo mạch hỗ trợ trên Internet, Đặng Hoàng Bá Khang cùng các thành viên trong nhóm đã sáng chế thành công mô hình robot tự động thu thập mủ cao su.
Nhóm đã có quãng thời gian thực nghiệm đo đạc các thông số như: khoảng cách đặt chén đựng mủ, địa hình rừng cây cao su, trung bình số cây trong mỗi rừng, thông thường có bao nhiêu ml nhựa cao su trong chén.
Mặc dù gặp rất nhiều khó khăn trong quá trình chế tạo nhưng cả nhóm vẫn quyết tâm làm bằng được sản phẩm này. “Những tháng ngày đồng hành với những người công nhân thu hoạch mủ cao su, thống kê thực nghiệm đã cho mình nhiều trải nghiệm đáng nhớ. Nhìn những người công nhân cặm cụi thu hoạch mủ với mồ hôi nhễ nhại mà mình thương lắm. Nhất là những chị công nhân nữ, đôi bàn tay của họ chai sạn, thô ráp, dáng đi liêu xiêu, vì phải xách chiếc thùng nặng mấy chục kg để thu hoạch mủ dọc theo những hàng cây cao su dài cả cây số khiến cả nhóm hạ quyết tâm thực hiện cho bằng được dự án”- Bá Khang chia sẻ.
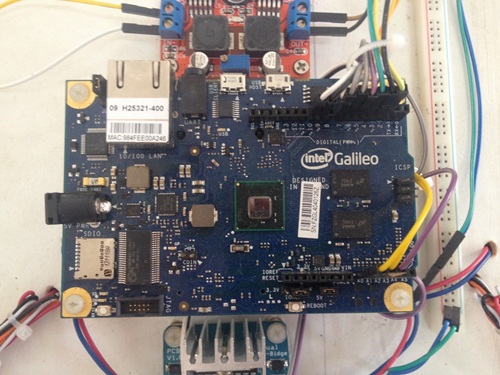
Robot thu thập mủ cao su tự động được lập trình trên vi mạch điện tử Arduino, Intel Galileo.
Cấu tạo chính của robot gồm một thiết bị phát hồng ngoại giúp xác định vật thể. Bộ phận cảm biến ánh sáng để xác định 2 màu đen và trắng được dán ngay chén và thông qua hệ thống servo (hệ thống để kiểm soát dụng cụ cơ khí phù hợp với biến đổi vị trí hoặc tốc độ mục tiêu giá trị) để làm tay cẩu đưa đầu máy hút vào chén. Nếu cây có gắn màu trắng là cây cao su, robot sẽ dừng lại một khoảng thời gian để hút mủ cao su. Trường hợp cây gắn màu đen thì robot sẽ bỏ qua công đoạn hút mủ cao su. Cánh tay máy với động cơ trợ động (servo) có khả năng tạo sức kéo với góc quay tối đa từ 0ođến 90o. Sau khi cánh tay đến đúng vị trí đựng mủ sẽ hút mủ cao su bằng ống nhựa PP/ PE. Vật liệu ống nhựa này có ưu điểm là chống dính mủ cao su, giảm tình trạng thất thoát, nghẽn ống trong quá trình hút mủ.
Robot di chuyển bằng hệ thống bánh xe là 2 bộ mô tơ truyền động với dòng tải nhỏ nhưng sức chịu tải cao, có thể vận hành tốt.
Robot sẽ tương tác với hệ thống quản lí bằng máy tính bằng hệ thống phát sóng Wifi shield trực tiếp trong rừng và thu nhận, báo cáo tình trạng hoạt động của robot như robot đang ở cây số mấy, đã hút được bao nhiêu cây.
“Một vấn đề của thiết bị phát hồng ngoại là có thể gặp trường hợp bị ánh sáng mặt trời phản xạ làm nhiễu tín hiệu. Vì thế, nhóm đã nghiên cứu sử dụng thiết bị siêu âm HY-SRF05 hoạt động thông qua sóng siêu âm với khoảng cách phát sóng tốt hơn” - Bá Khang, trưởng nhóm nghiên cứu cho biết.
Theo Nguyễn Văn Hưng, thành viên nhóm nghiên cứu, địa hình trong rừng cao su tương đối ghập ghềnh, việc di chuyển bằng bánh xe của robot sẽ gặp khó khăn. Sắp đến nhóm sẽ phát triển hệ thống bánh xích để giúp robot có thể vượt địa hình trong rừng như lá cây, tảng đá…
“Hiện tại sản phẩm robot thu hoạch mủ cao su tự động của chúng em chỉ hoạt động hoàn hảo trên mô hình cây cao su dựng sẵn. Tuy nhiên, thực tế với địa hình không bằng phẳng và những cây cao su không thẳng hàng là vấn đề mà chúng em phải giải quyết trong thời gian tới. Hy vọng rằng, mô hình này sẽ là bước đệm để chúng em tiếp tục nghiên cứu phát triển sản phẩm để có thể ứng dụng được trong thực tế” - Bá Khang nói.
Sản phẩm robot thu thập mủ cao su tự động đã vinh dự đạt giải khuyến khích cuộc thi Sáng tạo thanh, thiếu niên và nhi đồng toàn quốc 2015.
Nguồn: vusta.vn









.jpg)